Die induzierte EMK ist der elektrische Effekt, der Generatoren Spannung erzeugen, Transformatoren Energie übertragen, Sensoren Bewegungen erfassen und viele elektromagnetische Systeme Bewegung oder sich ändernde Felder in nutzbare Signale umwandeln lässt.
Der Kerngedanke der elektromagnetischen Induktion
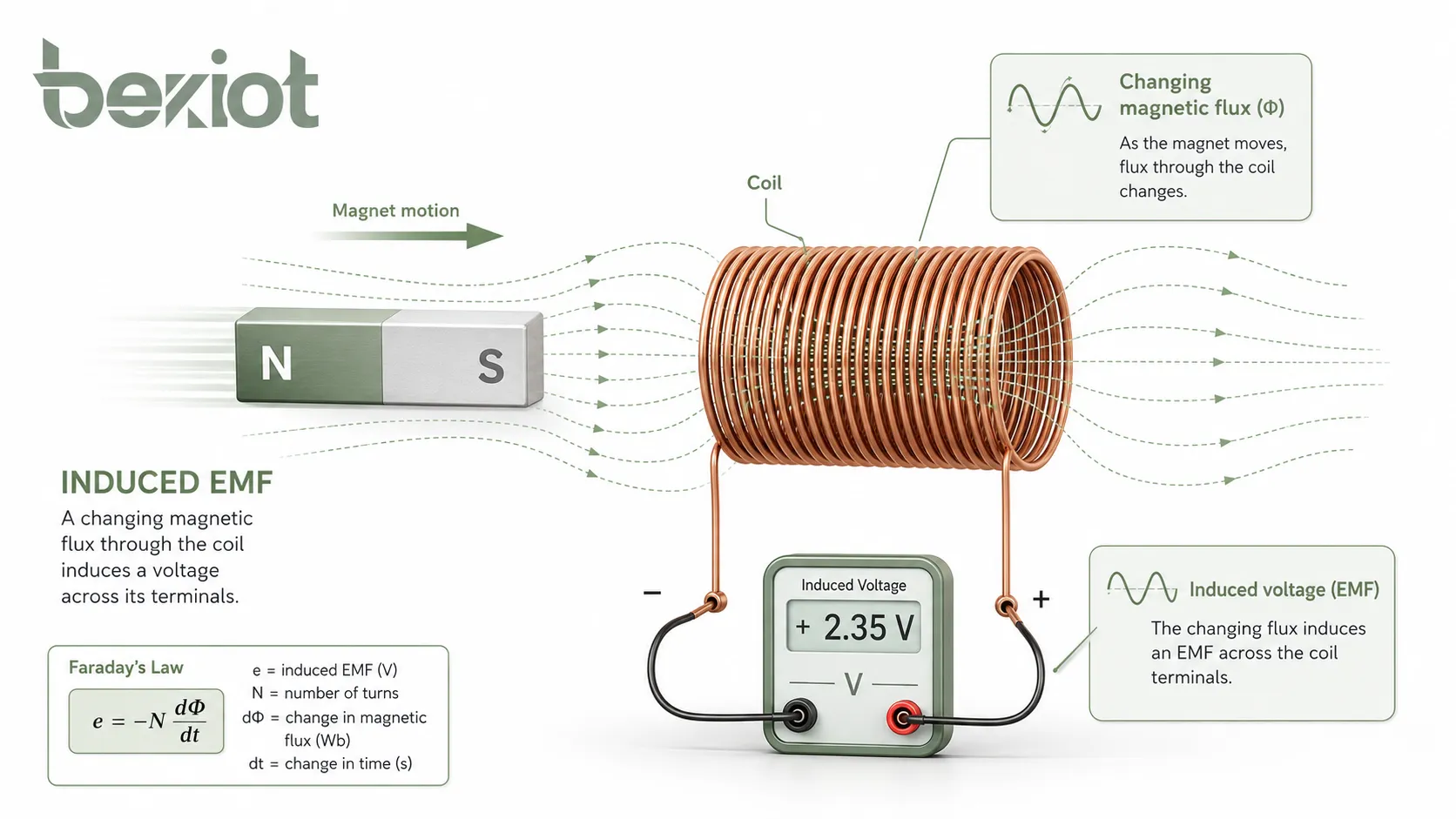
Die induzierte EMK (elektromotorische Kraft) oder Induktionsspannung ist die Spannung, die in einem Leiter oder einer Spule entsteht, wenn sich der mit ihr verkettete magnetische Fluss ändert. Das Wort „Kraft“ in elektromotorischer Kraft bedeutet keine mechanische Kraft. In der Elektrotechnik und Physik bezeichnet EMK die pro Ladungseinheit bereitgestellte Energie und wird in Volt gemessen.
Das Grundprinzip ist einfach: Erfährt ein Leiter ein sich änderndes Magnetfeld oder bewegt er sich so durch ein Magnetfeld, dass er die Feldlinien schneidet, wird eine Spannung erzeugt. Ist der Stromkreis geschlossen, kann diese Spannung einen Strom treiben. Ist er offen, kann die Spannung zwischen den Anschlüssen weiterhin bestehen, ein stetiger Strom kann jedoch nicht fließen.
Sich ändernder magnetischer Fluss
Der magnetische Fluss beschreibt, wie viel Magnetfeld durch eine gegebene Fläche tritt. Ändert sich die magnetische Flussdichte, die Fläche, der Winkel oder bewegt sich der Leiter relativ zum Feld, so ändert sich der mit dem Stromkreis verkettete magnetische Fluss.
Diese Flussänderung ist der unmittelbare Grund für das Auftreten der induzierten EMK. Eine Spule mit vielen Windungen kann eine höhere induzierte Spannung erzeugen, da jede Windung mit dem sich ändernden magnetischen Fluss verkettet ist und sich die Wirkungen addieren.
Das Faradaysche Gesetz in einem Satz
Das Faradaysche Gesetz besagt, dass die in einem Stromkreis induzierte EMK proportional zur Änderungsrate der magnetischen Flussverkettung ist. Eine schnellere Flussänderung erzeugt eine höhere induzierte Spannung. Mehr Windungen erhöhen die Spannung ebenfalls.
Deshalb verwenden Generatoren rotierende Spulen oder Drehfelder, Transformatoren nutzen einen magnetischen Wechselfluss und induktive Sensoren erfassen Bewegung oder Position über die Magnetfeldänderung.
Wie die induzierte EMK erzeugt wird
Es gibt zwei übliche Wege, eine induzierte EMK zu erzeugen. Erstens durch Änderung des Magnetfelds um einen ruhenden Leiter oder eine ruhende Spule. Zweitens durch Bewegen eines Leiters durch ein Magnetfeld, sodass er die magnetischen Feldlinien schneidet.
Beide Methoden folgen demselben Prinzip der elektromagnetischen Induktion. Was sich ändert, ist die physikalische Ursache der Flussänderung. Bei Transformatoren ändert sich das Magnetfeld mit dem Wechselstrom. Bei Generatoren bewirkt die mechanische Bewegung die Flussänderung.
Durch Änderung des Magnetfeldes
Wird eine Spule in die Nähe eines Magnetfeldes gebracht, das mit der Zeit zu- oder abnimmt, so ändert sich der magnetische Fluss durch die Spule. Dieser veränderliche Fluss induziert eine Spannung in der Spule, ohne dass die Spule selbst bewegt werden muss.
Dieses Prinzip wird in Transformatoren, Drosseln, Spulen für kabelloses Laden, Stromwandlern, elektromagnetischen Tonabnehmern und vielen Sensoren genutzt. In diesen Systemen wird das Wechselfeld meist durch Wechselstrom oder eine zeitlich veränderliche magnetische Quelle erzeugt.
Durch Bewegen eines Leiters im Magnetfeld
Bewegt sich ein Leiter durch ein Magnetfeld, erfahren die freien Ladungsträger im Inneren eine magnetische Kraft. Dies trennt die Ladungen entlang des Leiters und erzeugt eine Spannungsdifferenz – die sogenannte Bewegungs-EMK.
Die induzierte Spannung hängt von der magnetischen Flussdichte, der Leiterlänge, der Bewegungsgeschwindigkeit und dem Winkel zwischen Bewegung und Magnetfeld ab. Die maximale EMK wird erzielt, wenn der Leiter die Feldlinien im rechten Winkel schneidet.
Durch Drehen einer Spule im Magnetfeld
Ein Generator nutzt in der Regel eine Drehbewegung. Dreht sich die Spule im Magnetfeld, so ändert sich der Winkel zwischen Spulenfläche und Magnetfeld ständig. Dies führt zu einem sich ändernden magnetischen Fluss und erzeugt eine Wechsel-EMK.
Je schneller sich die Spule dreht, desto schneller ändert sich der magnetische Fluss. Das erhöht – je nach Generatorkonstruktion – die erzeugte Spannung und Frequenz. Darauf beruhen viele Drehstrom- und Wechselstromgeneratoren.
Die Rolle der Lenzschen Regel
Die Lenzsche Regel erklärt die Richtung der induzierten EMK und des Induktionsstroms. Sie besagt, dass der induzierte Strom stets so gerichtet ist, dass er der Flussänderung entgegenwirkt, die ihn hervorruft. Deshalb erscheint im Faradayschen Gesetz das Minuszeichen.
Die von der Lenzschen Regel beschriebene Gegenwirkung ist kein Zufall, sondern Ausdruck der Energieerhaltung. Würde der Induktionsstrom die ursprüngliche Änderung unterstützen statt ihr entgegenzuwirken, könnte das System Energie aus dem Nichts erzeugen – ein Verstoß gegen physikalische Grundsätze.
Warum die Richtung wichtig ist
Die Richtung ist bei Motoren, Generatoren, Relais, Transformatoren, induktiven Bremsen und Schutzschaltungen von Bedeutung. Erzeugt eine Spule eine EMK in der falschen Richtung, kann die Schaltung nicht bestimmungsgemäß arbeiten.
In der praktischen Verdrahtung spielen Polaritätsmarkierungen, Wickelsinn, Anschlussbezeichnungen und Phasenbeziehungen eine große Rolle. Ingenieure müssen die Richtung der induzierten EMK verstehen, wenn sie Spulen, Transformatoren, Generatoren und Sensoren verschalten.
Gegenspannung in Motoren
Dreht sich ein Motor, bewegen sich seine Wicklungen durch ein Magnetfeld und erzeugen eine induzierte Spannung, die der Versorgungsspannung entgegengerichtet ist. Man spricht von Gegenspannung oder Gegen-EMK. Sie begrenzt den Strom im Normalbetrieb und ist ein wesentliches Merkmal des Motorverhaltens.
Beim Anlauf ist die Motordrehzahl gering, daher ist die Gegen-EMK niedrig. Das kann zu einem hohen Anlaufstrom führen. Mit zunehmender Drehzahl steigt die Gegen-EMK und verringert die den Wicklungsstrom treibende Nettospannung.
Wichtige Formeln zur Berechnung
Die induzierte EMK kann je nach physikalischer Situation auf verschiedene Arten berechnet werden. Die allgemeinste Formel ist das Faradaysche Gesetz. Für einen geraden Leiter, der sich durch ein Magnetfeld bewegt, ist die Formel für die Bewegungs-EMK oft praktischer.
Vor der Berechnung sollte man klären, ob es sich um einen sich ändernden Fluss durch eine Spule, einen im Magnetfeld bewegten Leiter oder eine rotierende Spule handelt. Dann wählt man die passende Formel.
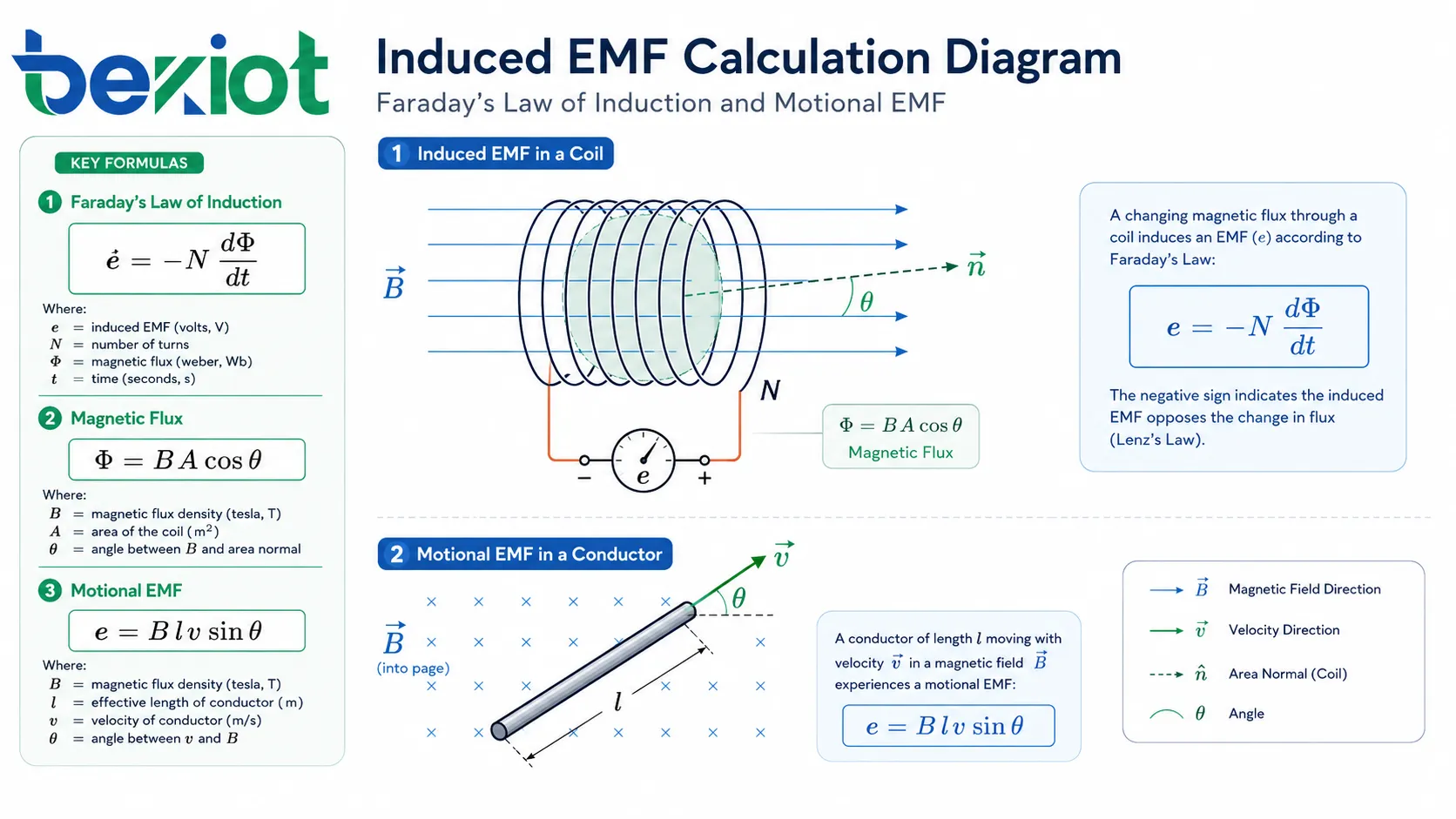
Faradaysches Gesetz für eine Spule
Die allgemeine Formel lautet:
ε = -N × ΔΦ / Δt
Dabei ist ε die induzierte EMK in Volt, N die Windungszahl der Spule, ΔΦ die Flussänderung in Weber und Δt das Zeitintervall in Sekunden. Das Minuszeichen repräsentiert die Lenzsche Regel und zeigt, dass die induzierte EMK der Flussänderung entgegenwirkt.
In vielen praktischen Rechnungen verwendet man den Betrag:
|ε| = N × |ΔΦ| / Δt
Formel für den magnetischen Fluss
Der magnetische Fluss berechnet sich zu:
Φ = B × A × cosθ
Dabei ist Φ der magnetische Fluss in Weber, B die magnetische Flussdichte in Tesla, A die Fläche in Quadratmetern und θ der Winkel zwischen dem Magnetfeld und der Senkrechten (Normalen) auf der Spulenfläche.
Steht das Magnetfeld senkrecht auf der Spulenfläche, ist der Fluss maximal. Verläuft es parallel zur Spulenfläche, ist der Fluss null, da keine Feldlinien die Fläche durchsetzen.
Formel für die Bewegungs-EMK
Für einen geraden Leiter, der sich durch ein Magnetfeld bewegt, lautet die übliche Formel:
ε = B × l × v × sinθ
Dabei ist B die magnetische Flussdichte in Tesla, l die wirksame Leiterlänge in Metern, v die Geschwindigkeit in Metern pro Sekunde und θ der Winkel zwischen Bewegungsrichtung und Magnetfeld. Bewegt sich der Leiter senkrecht zum Feld, wird sinθ = 1 und die Formel vereinfacht sich zu ε = B × l × v.
| Symbol | Bedeutung | Übliche Einheit |
|---|---|---|
| ε | Induzierte elektromotorische Kraft | Volt, V |
| N | Anzahl der Spulenwindungen | Windungen |
| Φ | Magnetischer Fluss | Weber, Wb |
| B | Magnetische Flussdichte | Tesla, T |
| A | Vom Magnetfeld durchsetzte Fläche | Quadratmeter, m² |
| l | Wirksame Leiterlänge | Meter, m |
| v | Leitergeschwindigkeit | Meter pro Sekunde, m/s |
| t | Zeit | Sekunde, s |
Schritt-für-Schritt-Rechenbeispiele
Die Berechnung wird einfacher, wenn der physikalische Vorgang klar erkannt wird. Das erste Beispiel nutzt das Faradaysche Gesetz für eine Spule, das zweite die Formel für die Bewegungs-EMK bei einem bewegten Leiter.
Beispiel 1: Spule mit veränderlichem Magnetfluss
Eine Spule hat 200 Windungen. Der magnetische Fluss durch jede Windung ändert sich in 0,5 Sekunden von 0,06 Wb auf 0,02 Wb. Wie groß ist die durchschnittliche induzierte EMK?
Die Flussänderung beträgt:
ΔΦ = 0,02 - 0,06 = -0,04 Wb
Der Betrag der Änderung ist 0,04 Wb. Mit dem Faradayschen Gesetz ergibt sich:
|ε| = N × |ΔΦ| / Δt = 200 × 0,04 / 0,5 = 16 V
Die mittlere induzierte EMK beträgt 16 Volt. Die tatsächliche Polarität hängt von der Richtung der Flussänderung und dem Wickelsinn ab, wie es die Lenzsche Regel beschreibt.
Beispiel 2: Leiter, der sich im Magnetfeld bewegt
Ein gerader Leiter mit einer wirksamen Länge von 0,5 m bewegt sich mit 3 m/s durch ein Magnetfeld von 0,8 T. Die Bewegung erfolgt senkrecht zum Magnetfeld. Wie groß ist die induzierte EMK?
Da sich der Leiter senkrecht zum Feld bewegt, ist sinθ = 1. Die Rechnung lautet:
ε = B × l × v = 0,8 × 0,5 × 3 = 1,2 V
Die induzierte EMK beträgt 1,2 Volt. Würde sich der Leiter nicht senkrecht, sondern in einem Winkel zum Feld bewegen, fiele das Ergebnis niedriger aus, da der Faktor sinθ kleiner als 1 wäre.
Beispiel 3: Fluss aus Feld, Fläche und Winkel
Eine Spule mit einer Fläche von 0,02 m² befindet sich in einem Magnetfeld von 0,5 T. Das Magnetfeld steht senkrecht auf der Spulenfläche. Wie groß ist der magnetische Fluss durch die Spule?
Da das Feld senkrecht zur Spulenfläche steht, beträgt der Winkel zwischen Magnetfeld und Flächennormalen 0 Grad, somit ist cos0° = 1. Der Fluss ist:
Φ = B × A × cosθ = 0,5 × 0,02 × 1 = 0,01 Wb
Ändert sich dieser Fluss später, so kann die induzierte EMK durch Anwendung des Faradayschen Gesetzes auf die Flussänderung pro Zeit berechnet werden.
Faktoren, die die induzierte Spannung beeinflussen
Die induzierte EMK wird von mehreren physikalischen und konstruktiven Faktoren beeinflusst. Deren Kenntnis hilft Ingenieuren, Generatoren, Transformatoren, Sensoren, induktive Geräte und elektromagnetische Systeme mit vorhersagbarem Ausgangsverhalten zu entwerfen.
Änderungsrate des Flusses
Je schneller sich der magnetische Fluss ändert, desto größer ist die induzierte EMK. Ein schnell bewegter Magnet erzeugt daher in derselben Spule eine höhere Spannung als ein langsam bewegter.
In Wechselstromsystemen beeinflusst die Frequenz die induzierte Spannung, da eine höhere Frequenz eine schnellere Flussänderung bewirkt. Dies ist bei Transformatoren, Drehstromgeneratoren, induktiver Energieübertragung und elektromagnetischer Sensorik von Bedeutung.
Windungszahl
Eine Spule mit mehr Windungen erzeugt bei gleicher Flussänderung pro Windung eine höhere induzierte EMK. Deshalb verwenden Transformatoren und Generatoren oft viele Drahtwindungen, um die gewünschte Spannung zu erreichen.
Allerdings steigen mit der Windungszahl auch der Widerstand, die Baugröße, die Kapazität und mitunter die Verluste. Die praktische Auslegung muss Spannungsabgabe, Stromtragfähigkeit, Erwärmung, Isolation und Bauraum in Einklang bringen.
Magnetische Feldstärke
Ein stärkeres Magnetfeld kann – bei sonst gleichen Bedingungen – einen größeren magnetischen Fluss und damit eine höhere induzierte EMK hervorrufen. Stärkere Magnete, bessere Magnetkerne und optimierte Luftspalte verbessern das Induktionsverhalten.
Auch die Magnetwerkstoffe spielen eine Rolle. Ein geeigneter Eisen- oder Ferritkern kann den magnetischen Fluss bündeln, jedoch müssen Sättigung, Hysterese und Wirbelstromverluste in realen Geräten berücksichtigt werden.
Fläche und Ausrichtung
Die Fläche der Leiterschleife und ihre Ausrichtung relativ zum Magnetfeld beeinflussen den magnetischen Fluss. Eine größere Schleife kann mehr Fluss erfassen. Eine auf maximalen Fluss ausgerichtete Schleife ergibt eine stärkere Änderung bei Feldvariation.
In rotierenden Maschinen entsteht die Wechsel-EMK durch den sich ständig ändernden Winkel zwischen Spule und Magnetfeld. Bei Sensoren lässt sich durch geschickte Platzierung und Ausrichtung die Signalstärke und Genauigkeit verbessern.
Anwendungen in elektrischen und elektronischen Systemen
Die induzierte EMK ist die Grundlage vieler elektrotechnischer Technologien. Sie beschränkt sich nicht auf die Schulphysik, sondern findet sich in der Stromerzeugung, Energiewandlung, Signalerkennung, Bewegungsmessung, drahtlosen Energieübertragung, Schutzsystemen und der Analyse der elektromagnetischen Verträglichkeit.
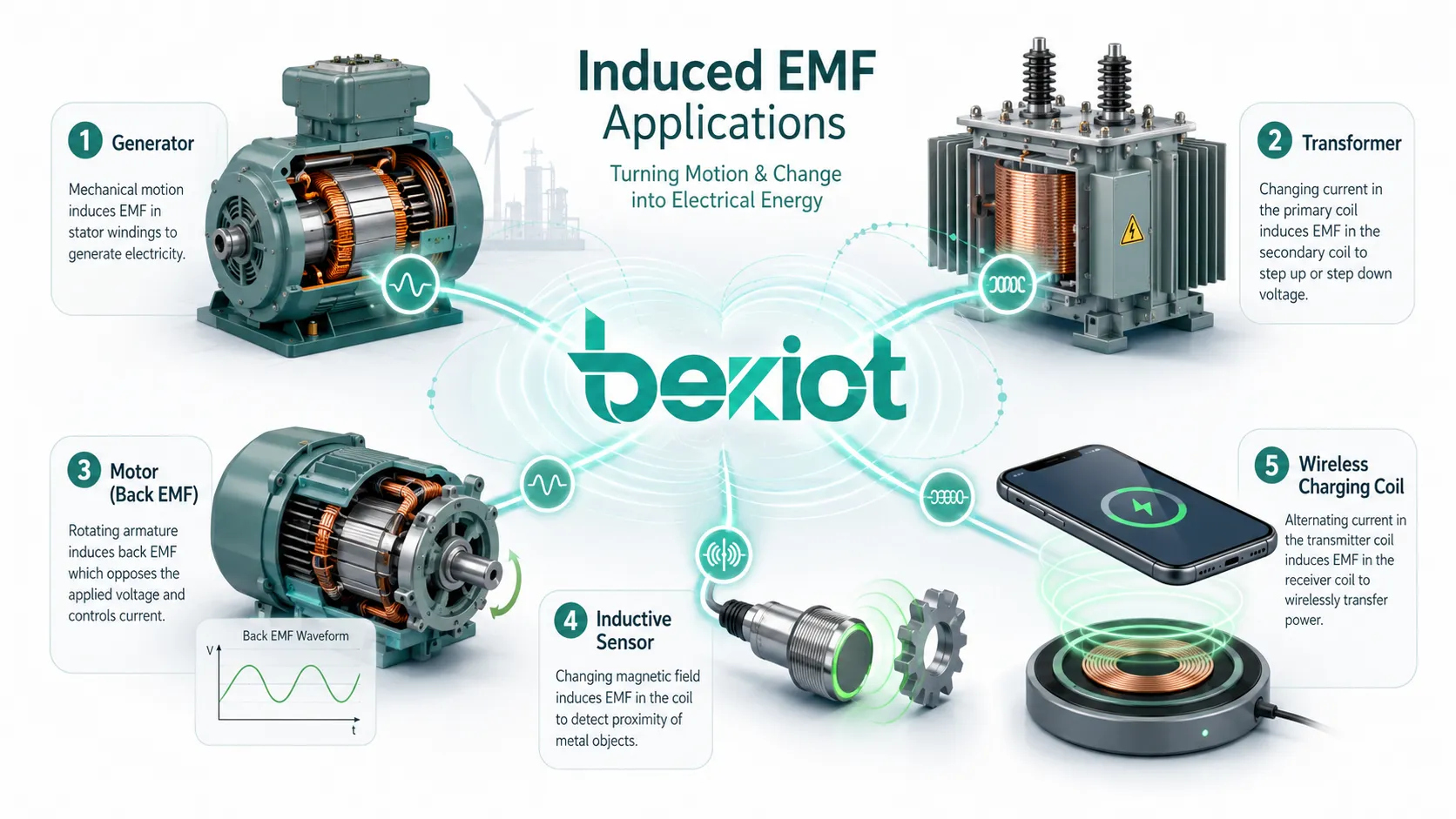
Generatoren und Drehstromgeneratoren
Generatoren wandeln mechanische Energie durch elektromagnetische Induktion in elektrische Energie um. Ein Leiter oder eine Spule bewegt sich relativ zu einem Magnetfeld, wodurch sich die Flussverkettung ändert und eine EMK entsteht.
In großen Kraftwerken treiben Turbinen die Generatorrotoren an, um elektrische Leistung zu erzeugen. In kleineren Systemen – etwa bei Lichtmaschinen, tragbaren Generatoren oder Fahrraddynamos – wird dasselbe Grundprinzip in anderen Maßstäben genutzt.
Transformatoren und Energieumformung
Transformatoren nutzen die induzierte EMK, um Energie über ein sich änderndes Magnetfeld zwischen Wicklungen zu übertragen. Der Wechselstrom in der Primärwicklung erzeugt einen wechselnden Fluss im Kern, der in der Sekundärwicklung eine Spannung induziert.
Das Spannungsverhältnis hängt im Wesentlichen vom Windungszahlverhältnis zwischen Primär- und Sekundärwicklung ab. Daher sind Transformatoren unverzichtbar für Energieverteilung, Ladegeräte, Netzteile, Trennschaltungen, Audiosysteme und Industrieanlagen.
Motoren und Gegen-EMK
Elektromotoren erzeugen beim Drehen eine Gegen-EMK. Diese induzierte Spannung wirkt der angelegten Versorgungsspannung entgegen und beeinflusst Motorstrom, Drehzahlverhalten, Wirkungsgrad und Regelverhalten.
Motorsteuerungen nutzen die Information der Gegen-EMK häufig zur Regelung, insbesondere bei bürstenlosen Gleichstrommotoren und sensorlosen Steuerungen. Das Verständnis der Gegen-EMK hilft Ingenieuren, sicherere und effizientere Motorsysteme zu entwickeln.
Sensoren und Messgeräte
Induktive Sensoren, magnetische Tonabnehmer, Stromwandler, Drehzahlmesser, Metalldetektoren und einige Durchflussmesser beruhen auf der induzierten EMK. Diese Geräte wandeln Bewegung, Position, Strom oder Magnetfeldänderungen in ein elektrisches Signal um.
Da die induzierte Spannung von Bewegung und Feldänderung abhängt, eignen sich derartige Sensoren oft zur berührungslosen Messung, zur Überwachung rotierender Maschinen, zur Drehzahlerkennung und in der Industrieautomation.
Kabelloses Laden und induktive Energieübertragung
Kabelloses Laden verwendet wechselnde Magnetfelder, um in einer Empfängerspule eine Spannung zu induzieren. Eine Sendespule erzeugt ein magnetisches Wechselfeld, und eine Empfängerspule wandelt einen Teil dieses Wechselflusses in elektrische Energie um.
Der Wirkungsgrad hängt von Spulenausrichtung, Abstand, Frequenz, Magnetdesign, Lastzustand und Steuerelektronik ab. Schlechte Ausrichtung oder zu großer Abstand verringern die induzierte Spannung und erhöhen die Verluste.
Praxishinweise zu Auslegung und Messung
In realen Systemen wird die induzierte EMK durch nichtideale Bedingungen beeinflusst. Widerstand, Streufluss, Kernverluste, Wirbelströme, Kapazität, Temperatur, Laststrom, Signalform und mechanische Toleranzen können die gemessene Spannung beeinflussen.
Leerlauf- und Lastspannung
Die nach dem Faradayschen Gesetz berechnete induzierte EMK stellt häufig die erzeugte Spannung vor der Berücksichtigung innerer Spannungsabfälle und Lasteinflüsse dar. Wird eine Last angeschlossen, fließt ein Strom, und die Klemmenspannung kann niedriger sein als die Leerlauf-EMK.
Das ist bei Generatoren, Transformatoren, Batterien und Sensoren üblich. Ingenieure müssen zwischen der erzeugten EMK und der tatsächlichen Klemmenspannung unter Betriebslast unterscheiden.
Wirbelströme und Verluste
Sich ändernde Magnetfelder können in leitfähigen Materialien Kreisströme induzieren – sogenannte Wirbelströme. Sie verursachen Erwärmung und Energieverluste in Transformatorkernen, Motorkernen, Generatorblechen und umgebenden Metallstrukturen.
Zur Reduzierung der Wirbelstromverluste werden Magnetkerne häufig lamelliert oder aus Werkstoffen mit höherem spezifischen Widerstand gefertigt. In Hochfrequenzanwendungen kommen auch Ferritkerne zum Einsatz, weil sie bestimmte Verlustmechanismen verringern.
Messung mit Instrumenten
Die induzierte EMK kann mit einem Voltmeter, Oszilloskop, Datenerfassungssystem oder speziellen Analysatoren gemessen werden. Das geeignete Instrument hängt von Signalpegel, Frequenz, Signalform, Quellimpedanz und davon ab, ob die Spannung konstant, gepulst oder wechselnd ist.
Bei schnell veränderlichen Signalen ist ein Oszilloskop oft zweckmäßiger als ein einfaches Multimeter, da es Signalform, Spitzenwert, Zeitverlauf und Einschwingverhalten zeigt. Bei sinusförmiger Wechselspannung wird üblicherweise der Effektivwert (RMS) verwendet.
Häufige Fehler bei der Berechnung
Viele Fehler bei der Berechnung der induzierten EMK rühren daher, dass Fluss, Magnetfeld, Fläche und Winkel verwechselt werden. Ein weiterer häufiger Fehler ist, die Windungszahl zu ignorieren oder den falschen Zeitabschnitt für die Flussänderung zu verwenden.
Feldstärke statt Fluss verwenden
Das Faradaysche Gesetz verwendet den magnetischen Fluss, nicht allein die magnetische Feldstärke. Sind magnetische Flussdichte, Fläche und Winkel gegeben, muss zunächst der Fluss mit Φ = B × A × cosθ berechnet werden.
Erst wenn der Fluss bekannt ist, kann seine zeitliche Änderung zur Berechnung der induzierten EMK herangezogen werden. Das Überspringen dieses Schrittes führt zu falschen Einheiten und unrichtigen Ergebnissen.
Ignorieren von Richtung und Polarität
Wird nur der Betrag verlangt, kann das Minuszeichen im Faradayschen Gesetz entfallen. Wird hingegen nach Richtung oder Polarität gefragt, muss die Lenzsche Regel beachtet werden.
Die Richtung hängt von der Orientierung des Magnetfelds, dem Wickelsinn, der Bewegungsrichtung und davon ab, ob der Fluss zu- oder abnimmt. Für eine genaue Polaritätsanalyse sind oft Skizzen erforderlich.
Verwechslung von Spitzen-, Mittel- und Effektivwerten
Eine wechselnde induzierte EMK kann als Spitzenspannung, Mittelwert oder Effektivwert (RMS) angegeben werden. Diese Werte sind nicht identisch. Der Effektivwert dient üblicherweise praktischen Leistungsberechnungen bei Wechselstrom, Spitzenwerte werden eher zur Signalformanalyse herangezogen.
Beim Vergleich von Generator-, Transformator- oder Sensordaten sollte stets geprüft werden, welcher Spannungswert unter welchen Betriebsbedingungen angegeben ist.
FAQ
Was ist induzierte EMK?
Die induzierte EMK ist die Spannung, die in einem Leiter oder einer Spule entsteht, wenn sich der mit ihr verkettete magnetische Fluss ändert. Sie kann durch ein veränderliches Magnetfeld, einen bewegten Leiter oder eine rotierende Spule im Magnetfeld hervorgerufen werden.
Welches Gesetz wird zur Berechnung der induzierten EMK verwendet?
Es wird das Faradaysche Gesetz benutzt. Die übliche Formel lautet ε = -N × ΔΦ / Δt, wobei N die Windungszahl, ΔΦ die Flussänderung und Δt das Zeitintervall ist.
Warum steht im Faradayschen Gesetz ein Minuszeichen?
Das Minuszeichen repräsentiert die Lenzsche Regel. Es zeigt, dass die induzierte EMK der Flussänderung, die sie verursacht hat, entgegenwirkt. Darin spiegelt sich die Energieerhaltung wider.
Wie wird die Bewegungs-EMK berechnet?
Die Bewegungs-EMK wird üblicherweise mit ε = B × l × v × sinθ berechnet. Bewegt sich der Leiter senkrecht zum Magnetfeld, vereinfacht sich die Formel zu ε = B × l × v.
Entsteht durch die induzierte EMK immer ein Strom?
Nein. Die induzierte EMK stellt eine Spannung dar. Ein Strom fließt nur, wenn ein geschlossener Leitungsweg vorhanden ist. In einem offenen Stromkreis kann zwar eine Spannung an den Klemmen anliegen, ein dauerhafter Strom kann jedoch nicht fließen.
Wo wird die induzierte EMK in realen Systemen verwendet?
Die induzierte EMK wird in Generatoren, Drehstromgeneratoren, Transformatoren, Motoren, induktiven Sensoren, Stromwandlern, kabellosen Ladesystemen, magnetischen Tonabnehmern und vielen elektromagnetischen Messgeräten genutzt.